Bolid autonomiczny - regulamin (PL)
Categories:
Bolid Autonomiczny
Znajdują się tutaj wszystkie fragmenty FS Rules które dotyczą bolidu autonomicznego we własnym przekładzie na język polski. Wszystkie użyte skróty definicji pochodzą z wersji angielskiej FS Rules 2024.
Wersja Polska (tłumaczenie własne)
A 4.1.1 Uczelnia może zarejestrować na zawody jedną drużynę z bolidem o silniku spalinowym i jedną drużynę z bolidem o silniku elektrycznym. Obydwie drużyny mogą brać udział w konkurencjach DC (pojazdy autonomiczne/bez kierowców)
A 4.4 Osoba odpowiedzialna za System Autonomiczny (ASR)
A 4.4.1 Celem wdrożenia do działania systemu autonimicznego, każda drużyna musi wybrać (minimum) jedną osobę odpowiedzialną za system autonomiczny. Osoba ta odpowiedzialna jest za wszystkie działania bolidu mające związek z systemem autonomicznym podczas zawodów. W skład tych działań wchodzi praca nad bolidem/systemem autonomicznym, jego testami, a także jego udziałem w poszczególnych konkurencjach.
A 4.4.2 W przpadku bolidów o napędzie elektrycznym Osoba odpowiedzialna za system autonomiczny (ASR) spełnia wszystkie obowiązki wymienione w punkcie 4.3 Regulacji Formuły Student na rok 2024, tym samym pełni też rolę osoby odpowiedzialnej za systemy elektryczne bolidu. Drużyna może powołać dodatkowe osoby do roli osób odpowiedzialnych za baterie/akumulatory i system trakcyjny. Suma zarejestrowanych ASR’ów i ESO (Osób odpowiedzialnych za systemy elektryczne) nie może przekraczać 4 osób.
A 4.4.3 Osoba odpowiedzialna za system autonomiczny jest jedyną w zespole, która może zadeklarować bolid wyposażony w system autonomiczny jako bezpieczny, umożliwiając tym samym przełączanie pojazdu między trybem jazdy manualnym i autonomicznym.
A 4.4.4 Osoba odpowiedzialna za system autonomiczny musi być pełnoprawnym członkiem zespołu. Więcej o kryteriach, jakie powinien spełniać członek zespołu można znaleźć w podpunkcie A 4.2.6
A 4.4.5 Osoba odpowiedzialna za system autonomiczny musi być obecna w pobliżu bolidu zawsze, gdy jest on w użyciu, jest transportowany na terenie zawodów.
A 4.4.6 Jeśli zespół wybrał tylko jedną Osobę odpowiedzialną za system autonomiczny, to osoba ta nie może być kierowcą.
A 4.4.7 Osoba odpowiedzialna za system autonomiczny musi odznaczać się odpowiednią wiedzą i umiejętnościami, by móc operować systemem autonomicznym, rozumieć jego działanie i skutecznie radzić sobie z jego naprawami, usterkami i testami. Kwalifikacja ASR, licencjat z: informatyki, elektryki, mechatroniki, automatyki, robotyki lub podobnych kierunków są wystarczające. Dokument potwierdzający kwalifikacje musi być oficjalnym dokumentem wydanym przez uczelnię i zawierać dokładne informacje o posiadanych kwalifikacjach.
A 5.6.2 [Tylko DC] Pod koniec VSV, samochód musi być przeprowadzić procedurę hamowania awaryjnego.
A 5.6.3 Pojazd autonomiczny musi posiadać ASSI (Sygnalizator Statusu Systemu Autonomicznego)
A 5.6.3 [Tylko DC] Oprócz widoku z trzeciej osoby, widok na kokpit i wizualizacja widoczności systemu autonomicznego i systema planowania trasy bolidu muszą być ujęte na podzielonym ekranie. Wszystkie te elementy muszą być zsynchronizowane w czasie.
[Tylko DC] W trybie autonomicznym pojazd musi poruszać się bez udziału kierowcy.
A 5.6.6 Jeśli drużynia odpadnie tylko z części zawodów dla pojazdów autonomicznych, to jest wykluczona tylko z ów części zawodów i nie ma to wpływu na pozostałe kategorie zawodów.
A 6.3.2 Wszystkie osoby odpowiedzialne za system autonomiczny muszą być obecne podczas spotkania drużynowego.
A 6.7.4 System autonomiczny bolidu musi być wyłączony (więcej w T 14.6), gdy jest transportowany na terenie padoku. Osoby odpowiedzialne za system autonomiczny muszą dopilnować, by nie doszło do nieautoryzowanej aktywacji głównego przełącznika systemu autonomicznego (ASMS), o czym mówi więcej podpunkt T 14.6.8 regulacji.
T 1.4 Definicje trybu jazdy
T 1.4.1 Tryb Manualny - pojazd znajduje się w trybie manualnym, gdy jest prowadzony przez człowieka. W tym wypadku w.w. ASMS musi być wyłączony.
T 1.4.2 Tryb Autonomiczny - pojazd znajduje się w trybie autonomicznym, gdy aktywny jest system autonomiczny. W tym trybie nikt nie może znajdować się wewnątrz pojazdu.
T 2.7.1 Systemy wspomagania prowadzenia pojazdu w formie linek, przewodów, pasków itp. do manipulowania przełącznikami w kokpicie są zabronione. Wyjątkiem jest, jeśli są one używane tylko i wyłącznie przez system autonomiczny.
T 11 Komponenty Elektryczne
T 11.10 Lampka stanu systemu (System Status Light)
T 11.10.1 Każda lampka sygnalizująca stan systemu elektrycznego(jak opisano w T 6.5 i T 14.11) musi spełnić następujące wymagania:
- Czarne tło
- Prostokątny, trójkątny lub okrągły kształt
- Równomiernie podświetlona powierzchnia o polu minimum 15cm^2
- Musi być dobrze widoczne w jasnym świetle słonecznym
- Jeśli uzyto diod LED, to odległość między nimi nie może przekraczać 20mm
- Jeśli użyto pojedynczego paska LED, to musi on mieć minimum 150mm długości
T 14 System Autonomiczny (AS)
T 14.1 Definicje
T 14.1.1 Każdy pojazd musi zaimplementować kompletny system autonomiczny, jak opisano w punkcie T14 i musi być prowadzony w trybie autonomicznym.
T 14.1.2 [Tylko CV] Poniższe definicje stosowane są celem utrzymania zgodności z sekcją o bolidach elektrycznych:
- Gotowość do jazdy - Silnik jest włączony i załączony jest bieg.
- System trakcyjny aktywny - Silnik jest łączony i bolid jest na biegu jałowym (także gdy nie jest aktywny system trakcyjny (?))
- Przekaźnik izolacji akumulatora (PIA) - Przekaźnik pompy paliwa jest ekwiwalentem.
T 14.2 Zdalne sterowanie bolidem
T 14.2.1 Zdalne sterowanie bolidem jest praktyką niedozwoloną
T 14.3 Zbieranie danych
T 14.3.1 Organizatorzy zawodów dostarczą ustandaryzowane urządzenie do zbierania danych, który musi być zamontowany w bolidzie na czas zawodów. Dalsze specyfikacje urządzenia i wymagany przez niego osprzęt i oprogramowanie można znaleźć w handbook’u.
T 14.3.2 Zespół musi dostarczyć dwa zestawy sygnałów do urządzenia zbierającego dane:
- Podstawowy zestaw sygnałów opisany w handbook’u
- Zestaw sygnałów charakterystyczny dla specyfiki danego bolidu monitorowany przez ASB (Autonomiczny system hamowania) celem zapewnienia nadmiarowości i wykrywania błędów.
- [Tylko CV] Mocowanie urządzenia zbierającego dane musi być zaplombowane podczas inspekcji technicznej
T 14.4 Zdalny system awaryjny (RES)
T 14.4.1 Każdy bolid musi zostać wyposażony w ustandaryzowany Zdalny System Awaryjny, któy dokładnie został opisany w handbooku.
T 14.4.2 RES musi zostać zakupiony przez zespół.
T 14.4.3 RES posiada dwie funkcje:
- Gdy wciśnięty jest przycisk zatrzymania awaryjnego, musi aktywować awaryjny obwód opisany w podpunkcie T 14.5.
- Gdy przycisk jazdy jest wciśnięty aktywowany jest przygotowany wcześniej protokół/proces jazdy.
T 14.4.4 Moduł RES pojazdu musi być bezpośrednio zintegrowany z jednym z przełączników obwodu awaryjnego
T 14.4.5 Przełącznik RES, który jest zintegrowany z SDC (Obwód przerywający) może być ominięty przez zwykle aktywne przełączniki, gdy bolid znajduje się w trybie jazdy manualnej. Przełącznik musi:
- być ciągle w połączniu z ASMS (Główny przełącznik trybu autonomicznego), więcej w T 14.7
- posiadać certyfikowany pod względem bezpieczeństwa wymuszony lub zwykle aktywne połączenie wpięte bezpośrednio i szeregowo z ASMS.
T 14.4.6 Antena modułu RES musi być zamontowana w sposób niekolidujący z innymi elementami pojazdu, innymi modułami bądź antenami.
T 14.5 Obwód przerywający (SDC) T 14.5.1 Obwód przerywający może zostać zamknięty wyłącznie przez system autonomiczny, jeśli spełnione są następujące warunki:
- W trybie manualnym - Wybrane jest zadanie jazdy manualnej, systemy jazdy autonomicznej i hamowania autonomicznego są wyłączone.
- W trybie autonomicznym - Wybrane jest zadanie jazdy autonomicznej, główny przełącznik jazdy autonomicznej jest w pozycji aktywnej i system hamowania autonomicznego jest aktywny i gotowy do działania.
T 14.6 Sygnały
T 14.6.1 Każdy sygnał wysłany przez system autonomiczny jest sygnałem krytycznym (czyli szczególnie ważnym). Jeśli błędy w działaniu bądź intepretacji sygnału mogą prowadzić do zaburzenia percepcji otoczenia systemu autonomicznego, misintepretacji sygnałów bądź zaburzeń autonimicznej jazdy, system musi odpowiednio zareagować.
T 14.7 Główny przełącznik systemu autonomicznego (ASMS)
T 14.7.1 Każdy pojazd musi być wyposażony w główny przełącznik trybu autonomicznego.
T 14.7.2 Główny przełącznik systemu autonomicznego musi być zamontoway w środku niebieskiej okrągłej strefy o średnicy ≥ 50 mm, umiejscowionej na mocno kontrastującym tle.
T 14.7.3 ASMS musi być oznaczony jako “AS”.
T 14.7.4 Zasilanie układu prowadzenia i aktywacja hamulców musi być przełączana/zarządzana przez:
- LVMS - Low Voltage Master Switch (Główny przełącznik niskiego napięcia)
- ASMS
Oprócz elementów ujętych w T 11.2.1 dozwolone jest użycie nieprogramowalnych układów jako elementów ASMS.
T 14.7.5 Gdy ASMS jest w pozycji wyłączonej, spełnione muszą być następujące warunki:
- System autonomiczny nie może wykonać procedury sterowania pojazdem, hamowania ani aktywacji napędu.
- Czujniki i sensory połączone z systemem autonomicznym mogą pozostać aktywne.
- Pojazd musi być możliwy do przemieszczenia wedle opisu w podpunkcie A 6.7.
- Pojazd musi być możliwy do prowadzenia w trybie manualnym tak jak zwykły pojazd kategorii CV lub EV.
T 14.7.6 Surowo zabroniona jest aktywacja ASMS gdy wewnątrz pojazdu znajduje się człowiek.
T 14.7.7 Gdy ASMS zostanie aktywowany pojazd nie może się przemieścić zanimnie wejdzie w stan R2D (czyli dopóki nie da sygnału gotowości do jazdy)
T 14.7.8 ASMS musi zostać wyposażony w zabezpieczenie chroniące przed przypadkową aktywacją. Osoba odpowiedzialna za system autonomiczny jest odpowiedzialna za kontrolowanie poprawnego użycia ASMS i zapewnienie, że przełącznik jest zablokowany w pozycji wyłączonej w czasie, gdy pojazd znajduje się poza strefą dynamiczną (czyli gdy się nie ściga) oraz gdy jest prowadzony w trybie manualnym.
T 14.8 Aktywacja układu prowadzenia
T 14.8.1 Aktywacja układu prowadzenia i jego użycie może nastąpić wyłącznie, gdy pojazd jest gotowy do jazdy.
T 14.8.2 Układ prowadzenia może być aktywny podczas procedury hamowania awaryjnego w czasie, gdy pojazd jest w ruchu.
T 14.8.3 Prowadzenie pojazdu w trybie manualnym musi być możliwe bez dodatkowych manualnych czynności (jak ręczne przełączanie/przepinanie elementów pojazdu) w czasie, gdy ASMS jest w pozycji wyłączonej.
T 14.9 Odłączenie elementów
T 14.9.1 Niedozwolone jest odłączanie żadnych części systemu autonomicznedgo w czasie trwania konkurencji dynamicznych.
T 14.9.2 Siłowniki/aktywatory mogą być odłączone celem przygotowania do jazdy manualnej, jeśli:
- Żadne elementy (w tym śruby i innego rodzaju elementy łączące) nie mogą być usunięte z pojazdu, to jest nie mogą utracić fizycznego kontaktu z mechanizmem odłączającym.
- Mechanizm odłączający nie może blokować czynności manualnych w żadnej pozycji czy płaszczyźnie.
- Mechanizm odłączający musi być zabezpieczony w każdej pozycji.
T 14.10 Definicje dotyczące statusu systemu autonomicznego - (ASSI)
T 14.10.1 System hamowania awaryjnego (EBS) uznawany jest za aktywny, gdy jego połączenie ze źródłem zasilania opisane w T 15.2.2 jest rozłączone po dokonaniu wstępnej sekwencji kontrolnej opisanej w T 15.3.1. Hamulce mogą być zwolnione po przeprowadzeniu kroków manualnych.
T 14.10.2 Status systemu autonomicznego musi być określany na podstawie schematu poniżej:
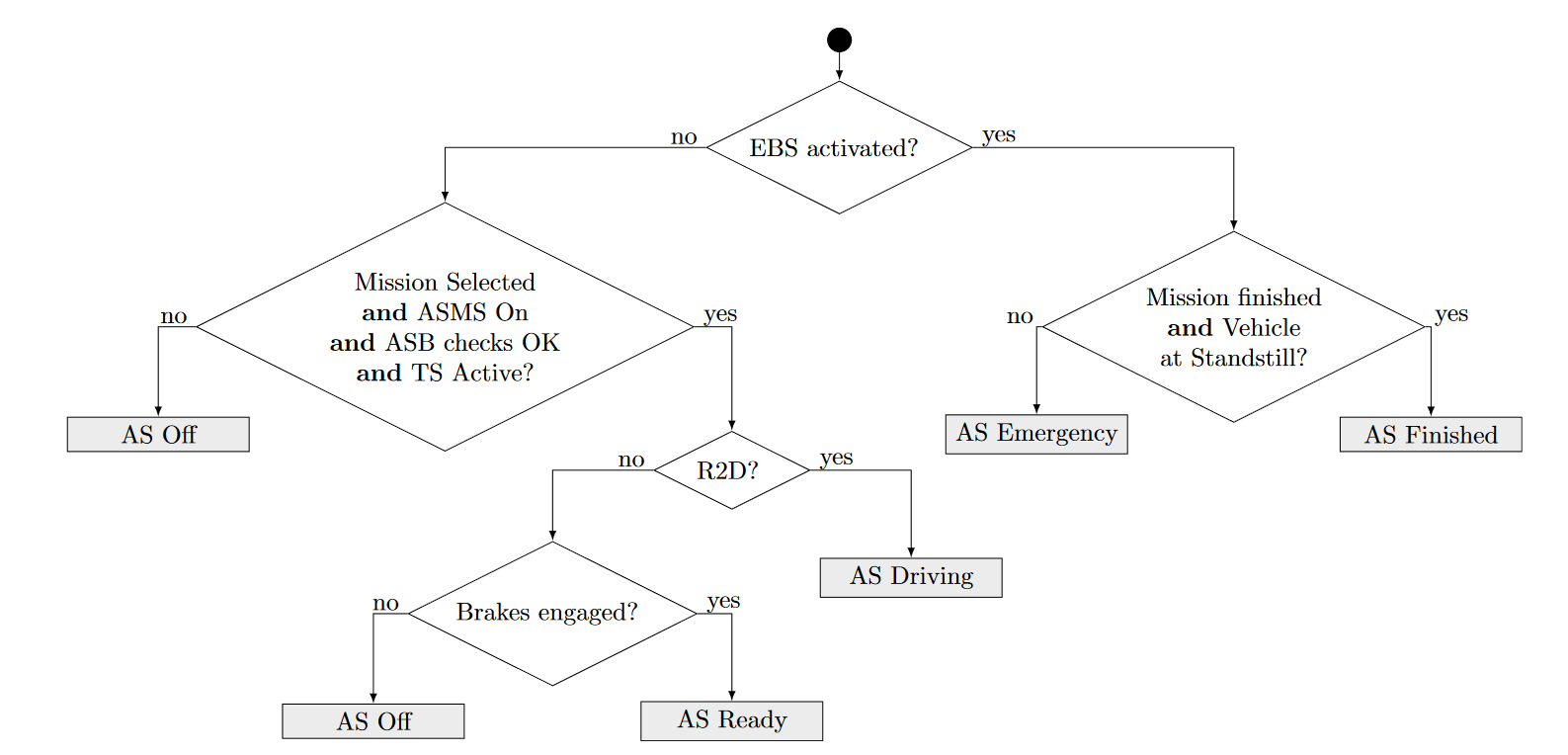
T 14.10.3 Status R2D (czyli gotowości do jazdy) może być aktywowany jedynie przez sygnał gotowości z modułu RES, gdy system trwał w trybie gotowości systemu autonomicznego (AS Ready) przez minimum 5 sekund.
T 14.10.4 Przeprowadzając czynności manualne inne niż aktywacja systemu trakcyjnego (TS) w pojeździe podczas, gdy główny przełącznik systemu autonomicznego jest w pozycji aktywnej są zabronione.
T 14.11 Wskaźniki/sygnalizatory statusu systemu autonomicznego
T 14.11.1 Pojazd musi zostać wyposażony w trzy ASSI (wskaźniki statusu systemu autonomicznego, lub inaczej sygnalizatory), które muszą informować o aktualnym statusie systemu autonomicznego. Sygnały muszą być zgodne z poniższą tabelką:
| SA Wyłączony | SA Gotowy | SA w ruchu | SA w stanie awaryjnym | SA zakończył działanie |
|---|---|---|---|---|
| Brak | Żółty ciągły | Żółty przerywany | Niebieski przerywany | Niebieski ciągły |
SA - System autonomiczny
ASSI nie mogą pełnić innych funkcji.
T 14.11.2 Dwa ASSI umiejscowione muszą być po bokach pojazdu za miejscem kierowcy, po jednym po każdej stronie. Dokładne umiejscowienie określono na obszar 160 mm pod szczytem obręczy głównej (main hoop) i 600 mm nad ziemią. Trzeci ASSI musi znajdować się z tyłu pojazdu w osi centralnej pojazdu w obszarze 160 mm pod szczytem obręczy głównej i 100 mm nad światłem hamowania.
T 14.11.3 Minimum jeden ASSI musi być widoczny pod każdym kątem powyżej 1.60m nad ziemią dookoła bolidu, w promieniu 3m od najwyższego punktu main hoop’a (czubka jego ramy)
T 14.11.4 Każdy ASSI musi spełniać wymogi opisane w T 11.10
T 14.11.5 Status awaryjne systemu autonomicznego (AS Emergency) musi być sygnalizowany sygnałem dźwiękowym o następujących cechach:
- częstotliwość między 1 a 5Hz
- cykl pracy 50%
- głośność między 80 a 90 dBA mierzona w odległości 3m od bolidu
- czas trwania między 8 a 10s po wejściu w stan awaryjny
T 14.12 Misje/Zadania Autonomiczne
T 14.12.1 System Autonomiczny musi mieć zaimplementowane minimalnie poniższe zadania/konkurencje:
- Acceleration (Przyspieszanie)
- Skidpad
- [DC ONLY(Tylko dla autonomików)] Autocross
- [DC ONLY(Tylko dla autonomików)] Trackdrive
- Test hamowania awaryjnego (EBS test)
- Inspekcja
- Tryb jazdy manualnej
T 14.12.2 Zadanie Inspekcji oznacza wejście silnika na wolne obroty i aktywowanie układu sterowniczego za pomocą sygnału sinusoidalnego. W tym czasie pojazd znajduje sie na podnośniku i nie posiada założonych kół. Po 25-30 sekundach pojazd musi przejść w tryb “AS Finished”, co oznacza zakończenie inspekcji.
T 14.12.3 Możliwe musi być wybranie dowolnej misji/zadania bez konieczności używania dodatkowych urządzeń zewnętrznych.
T 14.12.4 Rodzaj wybranej misji/zadania musi być sygnalizowany przez AMI (Autonomous Mission Indicator - Sygnalizator misji autonomicznej).
T 14.12.5 AMI musi być łatwy do odczytania, może być częścią wyświetlacza w bolidzie bądź może być umiejscowiony w pobliżu ASMS (Autonomous System Master Switch - Główny przełącznik systemu autonomicznego). Jeśli jako wyświetlacz użyto elektronicznego tuszu (e-ink), to musi znajdować się na nim informacja zapewniająca, że stan systemu jest aktualny. AMI uznawany jest jako SCS (System Critical Sygnał - Sygnał krytyczny).
T 14.13 Formularz Systemu Autonomicznego (ASF)
T 14.13.1 Przed rozpoczęciem zawodów, wszystkie zespoły muszą zaprezentować jasno i dokładnie zaprojektowaną dokumentację techniczną całego Systemu Autonomicznego, także zawierającą w sobie ASB (informacje na temat autonomicznego hamowania), którą nazwano ASF, czyli Formularz Systemu Autonomicznego.
T 15 System Hamowania Autonomicznego (ASB)
T 15.1 Wymogi techniczne
T 15.1.1 By uruchomić i operować w trybie autonomicznym, pojazd musi zostać wyposażony w system hamowania autonomicznego, którego elementem składowym także jest system hamowania awaryjnego opisany w T 15.2.
T 15.1.2 Wszystkie elementy ASB muszą być zlokalizowane w pobliżu ochrony przed przetoczeniem bolidu (Rollover Protection Envelope), jak opisano w T 1.1.16.
T 15.1.3 System trakcyjny NIE jest uznawany jako system hamowania/układ hamulcowy.
T 15.1.4 Hamowanie manualne musi zawsze być możliwe. W przypadku jednoczesnego hamowania manualnego i autonomicznego, zawsze do układu musi być dostarczane maksymalne możliwe ciśnienie.
T 15.1.5 Główne zbiorniki hamulcowe nie mogą być połączone szeregowo.
T 15.1.6 ASB (Autonomiczny System Hamowania) może być częścią hydraulicznego układu hamulcowego. Dla wszystkich elementów układu hamulcowego stosuje się obwód opisany w T 6. Do wszystkich pozostałych pneumatycznych i hydraulicznych komponentów stosuje się punkt T 9.
T 15.1.7 ASB musi być tak zaprojektowany, aby możliwe było jest łatwe odłączenie w maksymalnie dwóch punktach deaktywacji.
T 15.1.8 Wszystkie punkty deaktywacji ASB muszą:
- pracować bez użycia elektryczności
- być w pobliżu siebie
- muszą być zamontowane w pobliżu ASMS lub na górnej powierzchni pojazdu między przednią przegrodą a główną obręczą w pobliżu osi centralnej bolidu
- być sterowane za pomocą mksumalnie dwóch odpychających/przyciągających czynności. Kierunek i zwrot czynności musi być w pobliżu punktów deaktywacyjnych
- być opisane jako “Brake Release”, czyli “Zwolnienie Hamulca”
- mieć czerwony uchwyt/dźwignię
T 15.1.9 Użycie mocowań wciskowych jest zabronione w przypadku krytycznych układów pneumatycznych ASB oraz każdego innego układu/systemu korzystającego z tych samych źródeł energii niewyposażonych w poprawny rozłącznik.
T 15.2 System Hamowania Awaryjnego (EBS)
T 15.2.1 EBS musi używać jedynie ukadów/systemów pasywnych z mechanicznym zbiornikiem energii. Utrata energii elektrycznej z układu EBS musi prowadzić do natychmiastowego rozpoczęcia hamowania o specyfikacji określonej w punkcie T 15.4.
T 15.2.2 EBS musi być zintegrowany z LVMS, ASMS i RES, a także przełącznikiem zintegrowanym z SDC (równolegle z AIR (przełącznikiem izolaci akumulatora) bez opóźnień)
T 15.3 Bezpieczeństwo
T 15.3.1 Wstępna kontrola musi być przeaprowadzona celem potwierdzenia, że ASB jest w stanie wyprodukować wymaganie ciśnienie w układzie hamulcowym zanim AS (system autonomiczny) zostanie przełączony w tryb gotowości.
T 15.3.2 Po przeprowadzeniu kontroli wstępnej systemy ASB i SCS muszą być stale monitorowane pod kątem błędów i usterek.
T 15.3.3 Pojazd musi samodzielnie przełączyć się w stan bezpieczny, jeśli:
- nie można spełnić wymogów opisanych w T 15.2.1
- jeśli którykolwiek błąd w działaniu może prowadzić do utraty kontroli lub utracenia możliwości hamowania
T 15.3.4 Stan bezpieczny określa się jako stan, w którym pojazd jest w spoczynku (nie porusza się), a jego hamulce są zaciśnięte celem zapobiegnięcia jego niekontrolowanemu przemieszczeniu. Ponadto SDC (Obwód odłączający) musi być otwarty T 15.3.5 Aby wejść w stan bezpieczny pojazd musi wykonać manewr hamowania opisany w punktach T 15.4 oraz IN 11.2
T 15.4 Specyfikacja Awaryjnego Systemu Hamowania (EBSP)
T 15.4.1 Czas reakcji układu/systemu (czas między aktywacją SDC a rozpoczęciem hamowania) nie może przekroczyć 200 ms
T 15.4.2 Średnia prędkość hamowania musi być wyższa niż 10 m/s2 w warunkach suchej nawierzchni
T 15.4.3 W przypadku pojedynczej awarii ASB powinien zostać przeprojektowany, celem spełnienia minimum połowy specyfikacji opisanej w T 15.4.2
T 15.4.4 Podczas hamowania pojazd musi pozostać stabilny
CV 1.2.4 System autonomiczny nie może być wstanie (ponownie) uruchomić silnika
CV 1.5.1 Mechaniczna aktywacja hamulca może zostać użyta tylko, gdy tryb autonomiczny jest wyłączony
IN 1.2.1 Każdy pojazd musi pomyślnie przejść wszystkie elementy inspekcji technicznej oprócz inspekcji systemu autonomicznego, by móc zostać dopuszczonym do konkurencji dynamicznych go nie wymagających
IN 1.2.2 Każdy pojazd przed przystąpieniem do konkurencji dynamicznych dla pojazdów autonomicznych musi pomyślnie przejść inspekcję systemu autonomicznego
IN 1.5.1 Po zakończeniu inspekcji technicznej zabronione jest korygowanie sensorów systemu autonomicznego
IN 6.1 Elementy wymagane podczas inspekcji technicznej systemu autonomicznego
IN 6.1.1 Podczas inspekcji systemu autonomicznego wymaga się:
- Jednej osoby odpowiedzialnej za system autonomiczny
- W pełni gotowego pojazdu wyposażonego w system autonomiczny
- Dokumentacji wszystkich sensorów uzytych w pojeździe
- Dokumentów potwierdzających legislacje wszystkich użytych sensorów percepcji
- Zdalnego sterowania RES (Zdalnym systemem awaryjnym)
- ASF (Formularza systemu autonomicznego)
- Narzędzi wymaganych do (roz)montowania części systemu autonomicznego
- (W niektórych przypadkach) wydruków pytań z regulaminu